





● Space stabilisation platform, antenna system stabilisation
● Attitude/orientation reference system, multi-beam attitude sensing
● Unmanned vehicles, unmanned aerial vehicles, unmanned ship navigationandcontrol
● Space stabilisation platform, intel
Shared:






North Seeking Accuracy(deg) | ≤0.3*Secant Latitude | |
Heading accuracy(deg) | ≤0.04 (RMS, single antenna dynamic alignment) | |
Attitude accuracy(deg) | ≤0.02 | |
Position accuracy(m) | Inertial navigation ≤1nm/h (cep) | |
Satellite combination ≤1.5m (single-point positioning, RMS) | ||
DVL combination 1% x D (D is distance travelled) | ||
Odometer combination 0.3% x D (D is distance travelled) | ||
Speed accuracy(km) | ≤0.03m/s (satellite combination, RMS) | |
Start-up time | ≤5S | |
Alignment time | ≤1-2min (dual antenna satellite assist) | |
Data refresh rate(Hz) | 0.1-100 | |
Gyroscope range | ±1000°/s | |
Zero bias stability | ≤0.1°/h | |
Accelerometer range | ±30g | |
Zero bias stability | ≤50ug | |
Supply voltage | 18-36V(DC ) | |
Operating temperature | -40℃~65℃ | |
Storage temperature | -50℃~80℃ | |
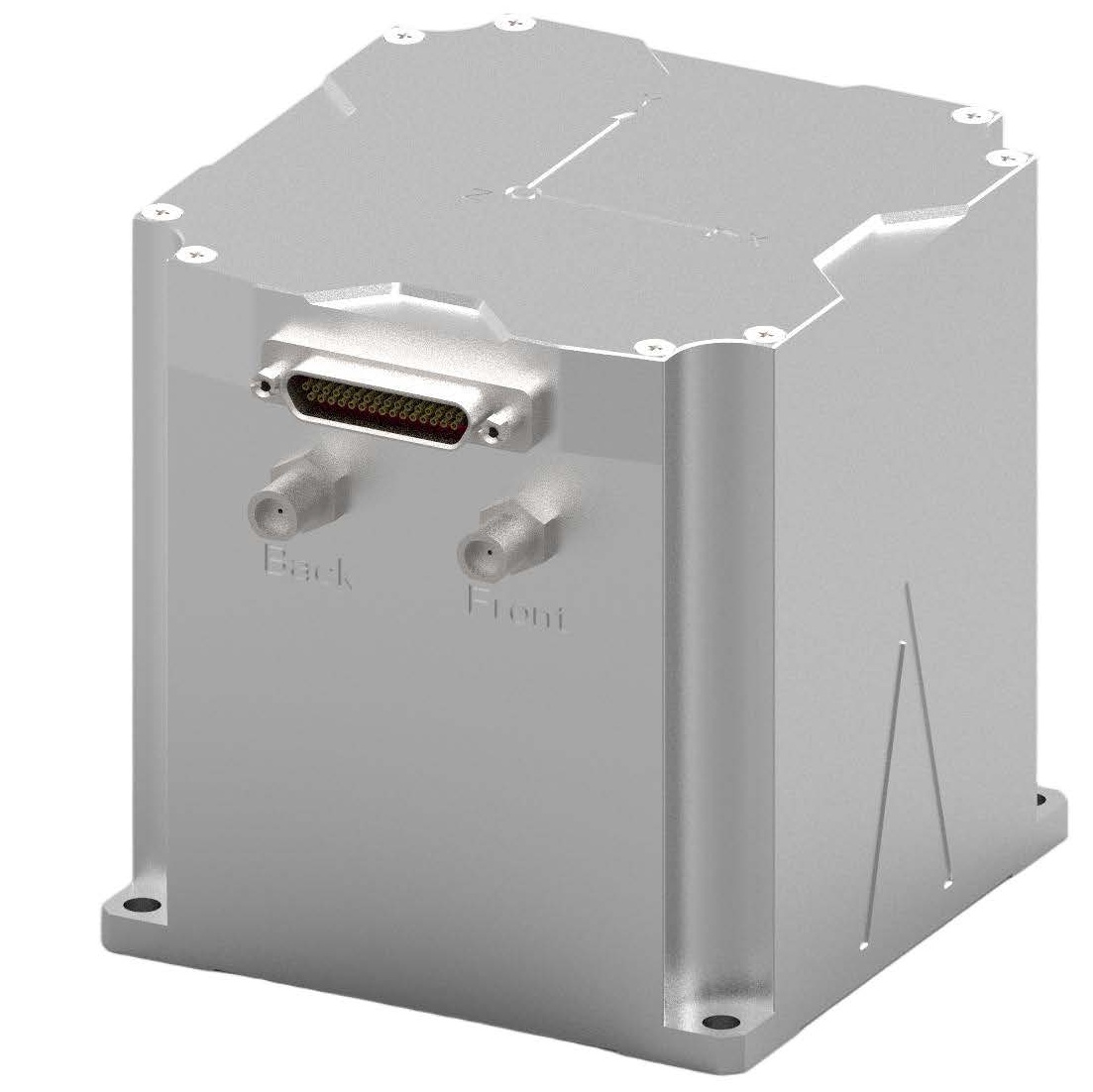
Physical dimensions | 80×80×87(mm) | |
Shock vibration | Meet GJB150.16A-2009, | |
Power consumption | ≤12W | |
Material | Aluminium alloy | |
Weight | ≤0.8kg | |
Interface form | 3×RS232,1×RS422,1×PPS,1×CAN, 1×RJ45 |

-
STAY CONNECTED





-
8:00am-7:00 pm Service Online
WhatsApp/Tel:+86 15050 672 146
+86 17606 118 008
Commercial:sales@bwsensing.com
Customer Service:support@bwsensing.com

Copyright © 2010-2023 Wuxi BEWIS Sensing Technology LLC 苏ICP备14001101号-6 Privacy Policy Cookies

 +86 189 2129 2620
+86 189 2129 2620
+86 176 0611 8008 sales@bwsensing.com
sales@bwsensing.com